검색결과 리스트

글
[논문 리뷰] 처음 보는 물체도 덥석! 박스 모델링으로 해결하는 로봇의 손동작(Minimum Volume Bounding Box Decomposition for Shape Approximation in Robot Grasping)
인간에게는 아주 쉬운 '물건 집기'가 로봇에게는 왜 그렇게 어려울까요? 우리가 눈을 감고도 컵을 잡을 수 있는 이유는 컵의 전체적인 '형체'를 이미 알고 있기 때문입니다. 하지만 로봇은 처음 보는 물체를 마주하면 방대한 3D 데이터를 처리하느라 과부하에 걸리곤 합니다.
오늘 소개할 논문은 로봇에게 복잡한 계산 대신 '박스(Box)'라는 아주 단순한 안경을 씌워주는 기술을 제안합니다. 이 기술이 완성되면 로봇은 처음 보는 복잡한 장난감이나 도구도 망설임 없이 덥석 잡아 우리에게 건네줄 수 있게 될 것입니다.
정교함보다 중요한 것은 '속도'와 '단순함'
로봇이 실생활에서 우리를 도우려면 물체를 인식하는 데 몇 분씩 걸려서는 안 됩니다. 기존 연구들은 물체를 아주 정밀한 곡면으로 표현하려 했지만, 이는 계산이 너무 복잡하고 센서의 작은 노이즈에도 쉽게 무너지는 단점이 있었습니다.
이 논문은 "사람도 사과를 잡을 때나 컵을 잡을 때 손의 모양이 크게 다르지 않다"는 점에 주목했습니다. 즉, 물체의 아주 미세한 굴곡보다는 전체적인 '덩어리감'만 알아도 충분히 안정적으로 잡을 수 있다는 것이죠. 그래서 선택한 것이 바로 가장 계산하기 쉬운 '박스' 형태입니다.

왼쪽은 기존 방식대로 물체를 아주 정밀하게 묘사한 모습입니다. 보기엔 좋지만 계산이 너무 무겁죠. 오른쪽은 이 논문이 제안한 방식입니다. 토끼를 하나의 커다란 상자에 넣은 것 같은데, 이것만으로도 로봇은 "아, 이 정도 크기의 물체가 이 방향으로 있구나"라는 것을 즉시 알 수 있습니다.
물체를 박스로 쪼개는 'Fit-and-Split'의 마법
이 논문의 핵심은 물체를 가장 잘 설명하는 박스들의 조합을 찾는 것입니다. 그 과정은 크게 세 단계로 나뉩니다.
① 첫 번째 박스 씌우기 (Fit)
먼저 물체의 모든 점을 포함하는 가장 타이트한 박스 하나를 만듭니다. 이를 위해 \(O(n \log n)\)이라는 매우 빠른 효율을 가진 알고리즘을 사용합니다.
② 그림자를 이용한 분할 (Split)
박스 하나로는 물체의 모양을 다 설명할 수 없으니 이를 적절히 쪼개야 합니다. 이때 3D 공간을 직접 뒤지는 대신, 박스의 각 면에 물체의 그림자를 비추는 방식을 썼습니다. 그림자를 보면 어디를 잘라야 박스 두 개가 물체의 모양을 더 잘 감싸게 될지 한눈에 보이기 때문입니다.

3D 입체를 다루는 건 어렵지만, 종이에 비친 그림자를 다루는 건 쉽습니다. 토끼를 세 방향에서 바라본 그림자를 그리드 위에 뿌려놓은 모습입니다. 이 그림자들의 면적을 계산해서, 어느 지점을 싹둑 잘라야 가장 알짜배기 박스 두 개가 나올지 순식간에 찾아냅니다.
③ 똑똑한 중단 (Stopping Criterion)
무한정 박스를 쪼개는 것이 아니라, "박스를 더 쪼갰을 때 부피가 획기적으로 줄어드는가?"를 따집니다. 만약 더 쪼개도 부피 차이가 거의 없다면(즉, 물체의 모양을 더 잘 설명하지 못한다면) 계산을 멈춥니다. 또한 데이터가 너무 적은 부분은 노이즈로 간주하고 무시하여 안정성을 높였습니다.
실험 결과
이 논문은 이상적인 3D 모델뿐만 아니라, 실제 센서로 얻은 거칠고 불완전한 데이터로도 실험을 진행했습니다.
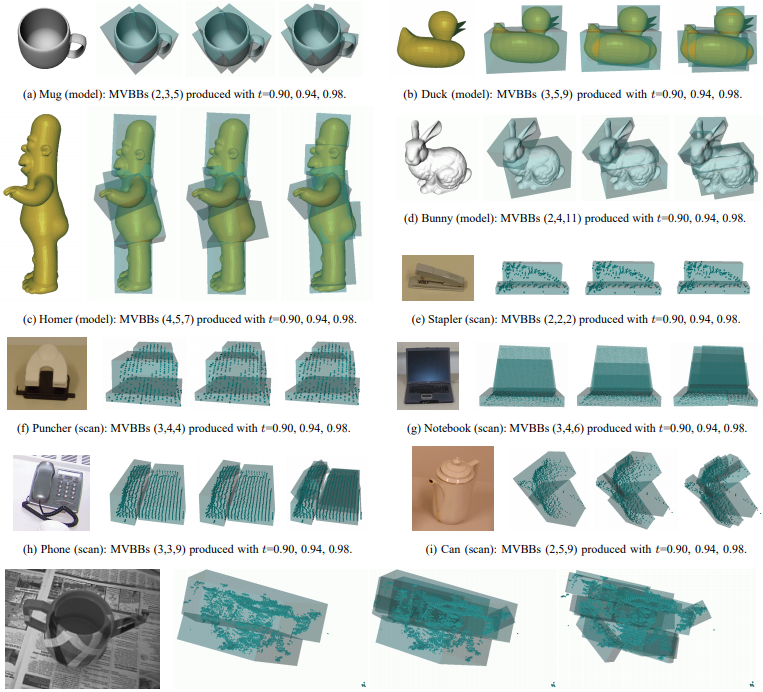
머그컵, 오리 인형, 전화기 등이 박스들로 쪼개지는 과정입니다. 처음에는 박스 1개였다가 설정값을 조절함에 따라 박스가 늘어나며 물체의 실루엣을 닮아갑니다. 지저분한 실제 카메라 데이터(가장 아래 이미지)에서도 꽤 정확하게 형태를 잡아내는 것을 볼 수 있습니다.
실험 결과, 박스로 요약된 모델을 바탕으로 로봇이 잡을 위치를 정했을 때, 아무 정보 없이 무작위로 잡으려 할 때보다 **성공률과 안정성이 비약적으로 향상**되었습니다. 특히 노이즈가 많은 실제 환경 데이터에서도 박스 모델은 형태의 뼈대를 놓치지 않고 잘 잡아냈습니다.
이 기술이 가져올 미래: 의미 있는 손길
이 기술의 진짜 매력은 로봇에게 '행동의 의미'를 가르칠 수 있다는 점입니다.
안정적 이동: 물체를 단단히 옮겨야 한다면 가장 큰 박스 부분을 꽉 잡습니다.
섬세한 전달: 사람에게 건네주어야 한다면 물체 끝부분의 가장 작은 박스를 잡아 사람이 잡을 자리를 남겨줍니다.
전시 및 검사: 카메라가 물체를 잘 볼 수 있도록 가장 구석진 박스를 잡습니다.

실제 로봇 손이 물체를 파지하는 시뮬레이션 장면입니다. 그래프의 점들이 우측 상단으로 갈수록 로봇이 물체를 안정적으로 꽉 잡았다는 뜻인데, 박스 모델을 사용한 결과(검은 점)가 무작위 시도(초록 점)보다 월등히 우수함을 보여줍니다.
결론
결국, 복잡한 세상을 단순한 박스들의 조합으로 바라보는 것만으로도 로봇은 훨씬 더 인간답고 효율적으로 일할 수 있게 됩니다. 완벽함보다는 '적당한 단순함'이 실생활 로봇에게 얼마나 큰 힘이 되는지 보여준 흥미로운 연구였습니다.
자세한 내용은 아래의 논문을 읽어주시기 바랍니다.
https://ieeexplore.ieee.org/document/4543434
Minimum volume bounding box decomposition for shape approximation in robot grasping
Thinking about intelligent robots involves consideration of how such systems can be enabled to perceive, interpret and act in arbitrary and dynamic environments. While sensor perception and model interpretation focus on the robot’s internal representatio
ieeexplore.ieee.org
'공대생의 팁' 카테고리의 다른 글
| Ubuntu로 apt 사용시 SSL 인증서 신뢰 문제 발생시 해결방법 (0) | 2025.11.28 |
|---|---|
| Ubuntu에서 Youtube 동영상 PIP모드에서 다른 창에 의해 화면이 가려질 때 해결방법 (0) | 2025.10.28 |
| 티스토리에서 카카오 로그인시 튀어나오는 팝업 광고 삭제 방법 (0) | 2025.05.20 |
| Huggingface에서 데이터셋 다운로드가 계속 끊길때 해결방법 (0) | 2025.01.14 |
| Flask 라이브러리로 이미지를 업로드하고 볼 수 있는 서버 구축하기 (0) | 2024.10.26 |
